Overview
Anterior Cruciate Ligament (ACL) is one of the major knee ligaments that joins the upper part of the leg and lower part of the leg together and maintains the knee stability. A significant limiting factor that prevents maximal potential recovery of patients following ACL surgery is pain. The overall objective is to propose a mechanical exoskeleton that allows restricted range of motion during post- operative rehabilitation (ensures the safety of the newly reconstructed ACL graft) and a clinical testing plan to use the proposed device with the pain reducer device to understand the overall effect of the combination on the recovery of the patient.
Solution
Proposed Exoskeleton
The proposed exoskeleton provides an external support for the injured knee and aids the ACL patients in their rehabilitation. The integration of exoskeleton with the interferential current therapy (IFC) is relatively a novel approach in the rehabilitation process of ACL patients. As discussed, IFC reduces the knee pain aiding patients to exercise to their full potential while the exoskeleton ensures that leg movement is well within the safety limits. The main focus of the exoskeleton is to control the range of motion based on doctor’s instruction.
Design
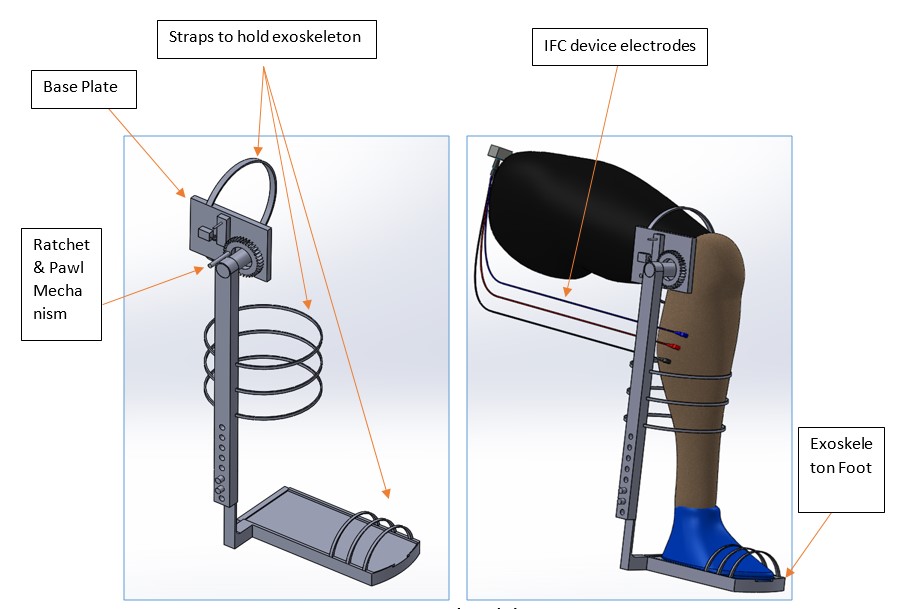
The exoskeleton is designed using Solidworks package. The three main components of the exoskeleton are the foot, bar and base plate. The foot is designed to accommodate the foot of the of the person. Multiple straps have been used to fasten the foot of the patient to the exoskeleton foot. More straps could be used depending on the need. A rectangular bar connected with a pin joint at the top and having multiple holes along its length is used to connect the foot of the exoskeleton to the base plate. The purpose of the multiple holes is to adjust the length of the exoskeleton based on patient’s leg length. As specified above the bar is attached to the base plate with the help of a rotational joint. The base plate accommodates the ratchet and pawl mechanism that controls the range of motion. The base plate is tightly fastened to the thigh with the help of straps.
Proposed Exoskeleton
Mechanism
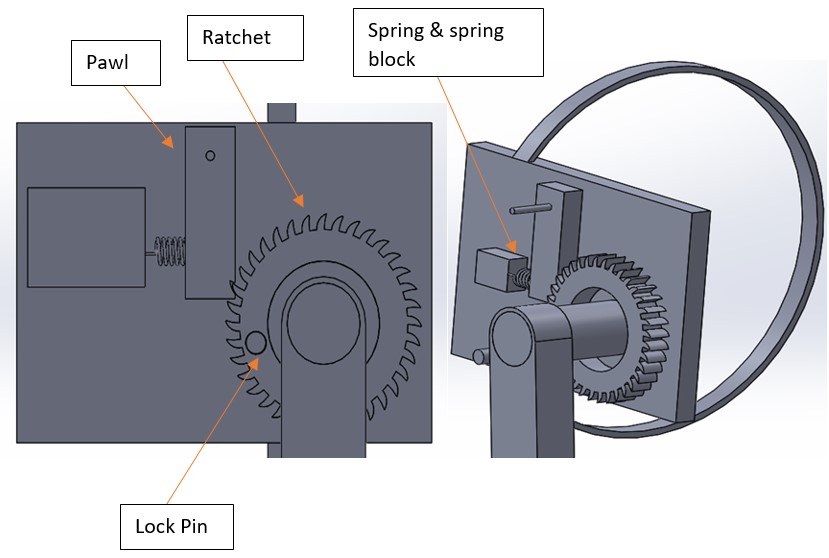
Ratchet and pawl mechanism is used to control the rotational motion of the leg. The mechanism is fixed to the base plate and is independent of the rotational joint. The mechanism itself is a separate entity on the base plate with the sole purpose of restricting rotational motion based on the needs. The ratchet (wheel) can rotate freely only in one direction while the motion is completely restricted in the other direction with the help of a pawl (rectangular block). When the pawl mates with a tooth of the ratchet it restricts the ratchet’s rotation in that direction. The mechanism is designed in such a way that counterclockwise rotation of the ratchet is permitted while the clockwise rotation is completely restricted. The pawl is constantly brought back to its initial position with the help of spring block and spring. The ratchet is provided with a hole through which a lock pin can be screwed. This lock pin (cylindrical rod) restricts the exoskeleton from rotating beyond a certain point with the help of the ratchet and pawl mechanism. The position of the lock pin can be varied manually by adjusting the position of the hole in the ratchet through the counterclockwise rotation. The teeth of the ratchet in this prototype are designed to provide a restriction for every five degrees from the fully stretched horizontal position of the leg.
Exoskeleton Mechanism